Interact Rover
European Space Agency - Telerobotics & Haptics Laboratory, TUDelft, AIM Telerobotics
Interact rover is the new testbed of ESA Telerobotics & Haptics Lab for haptic space teleoperation experiments. An experiment using this rover took place in September of 2015 with the Danish astronaut Andreas Mogensen.
The project started with the "Advanced Embodiment Design" course in my MSc program at TU Delft. Afterwards, I co-founded and worked in the student organization "AIM Telerobotics" at the TUDelft Dreamhall to deliver the complete rover. The complete project duration was 15 months.
Through the project:
The project started with the "Advanced Embodiment Design" course in my MSc program at TU Delft. Afterwards, I co-founded and worked in the student organization "AIM Telerobotics" at the TUDelft Dreamhall to deliver the complete rover. The complete project duration was 15 months.
Through the project:
- I got experienced at managing a large project.
- I designed for easy assembly, access and maintenance.
- I did detail design for the waterproof enclosures.
- I researched robot anthropomorphization for human interaction.
- I did extensive parametric surface and solid modeling on the Solidworks CAD software.
- I designed molds of the composite shell on the Rhinoceros 3D CAD software.
- I did hands-on composite production.
- I presented my work as a poster session at a scientific conference at ESA.

In space application of telerobotics, the distance between the user and the robot can be very large , such the distance from the International Space Station to Earth. This large distance, and due to the complexity of the ISS-Ground connectivity means that the connection will have high latency (delays) and will be of low quality.
The user of such robots will be astronauts in orbit. However, the effects of micro gravity, and living in a spacecraft can be severe on the human body, and haptic feedback teleoperations done by astronauts is a new topic in the space technology research. The INTERACT rover was designed to operate under sub-optimal conditions to carry out the large number of experiments needed to develop resilient teleoperation technologies.
The user of such robots will be astronauts in orbit. However, the effects of micro gravity, and living in a spacecraft can be severe on the human body, and haptic feedback teleoperations done by astronauts is a new topic in the space technology research. The INTERACT rover was designed to operate under sub-optimal conditions to carry out the large number of experiments needed to develop resilient teleoperation technologies.
Research, Ideation and Conceptualization Phase

Initial sketches for the rover design being discussed with our client at the ESA.
Since the experiments with the rover are going to be visible by the public, there were a large number of iterations on the styling of the casing, based on research done on robot anthropomorphization and form studies. The rover also had a large number of usability requirements, such as easy order of assembly, quick access to some components, possibility to perform repairs, updates and cleanability.

An earlier design of the rover at the end of the AED phase. Notice the nose cone design that was later modified.
Embodiment Phase
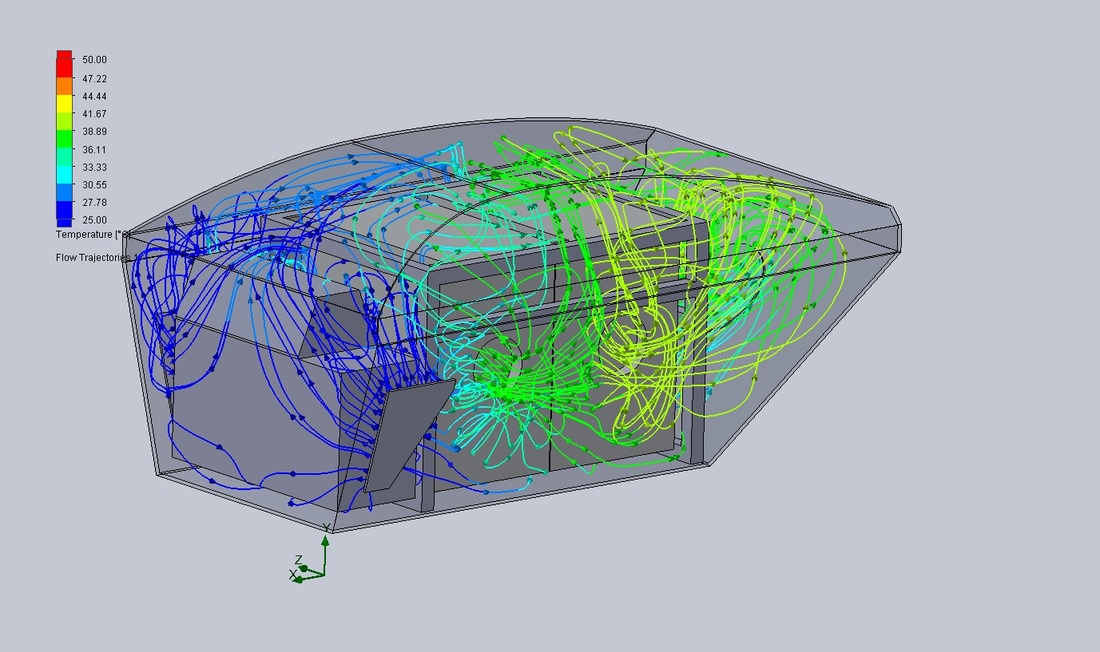
Temperature plot of the air flow inside the rover.
|
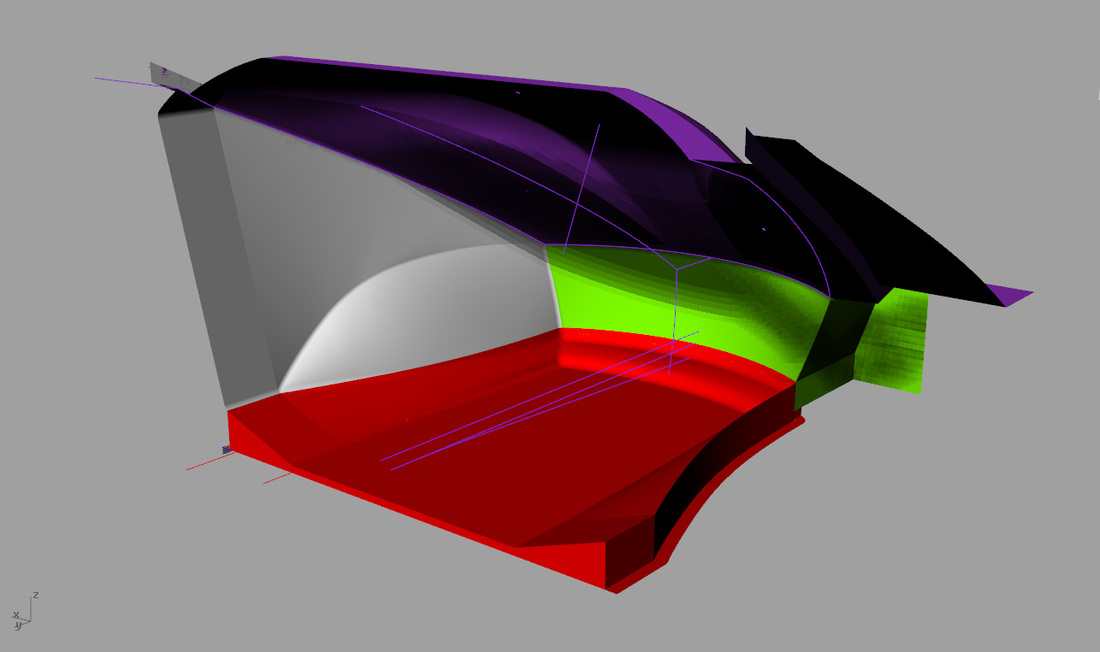
5-Part mold designed for the nose cone.
|
Following the conceptualization phase, CAD models were created. FEA & thermal CFD analysis were run in Solidworks to design the load carrying structure and to optimize the air flow. Molds were designed and machined into PU foam to start the production of the casing.

Machining of composite molds in the Faculty of Industrial Design Engineering.
|

Production of the composite parts at the TUDelft Dreamhall Lamination Lab.
|
Integration Phase
The integration was done in the ESA Telerobotics & Haptics Lab and the TUDelft Dreamhall.

The laser center finding tool made to find the axis of the robotic arm mounts.
|
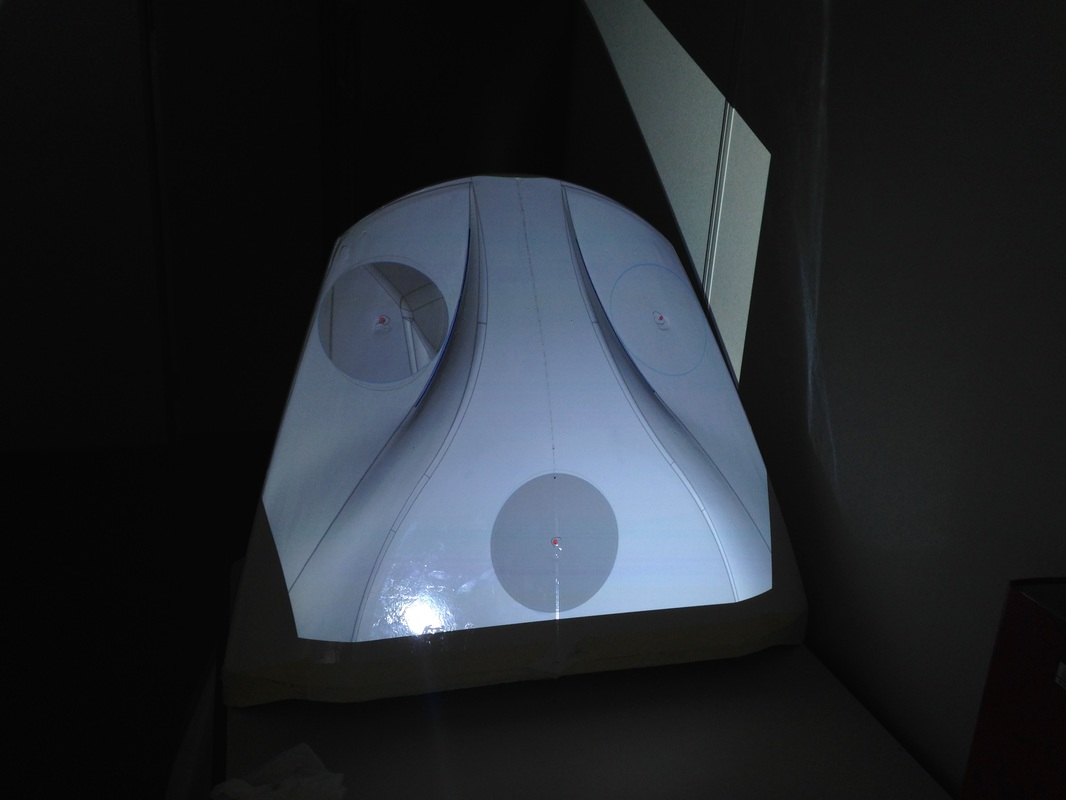
A calibrated projector being used to project the cut-out pattern onto the nose cone.
|
A number of specialized small tools and techniques were made to assist in the integration phase, mostly to take accurate measurements and make markings on the parts.

Installing the KUKA Lightweight Robot Arm to the rover.
Final Assembly and Testing Phase
The final assembly was done in the ESA Telerobotics & Haptics Lab.
CAD Model of the head of the rover.
|

Assembly of the head.
|
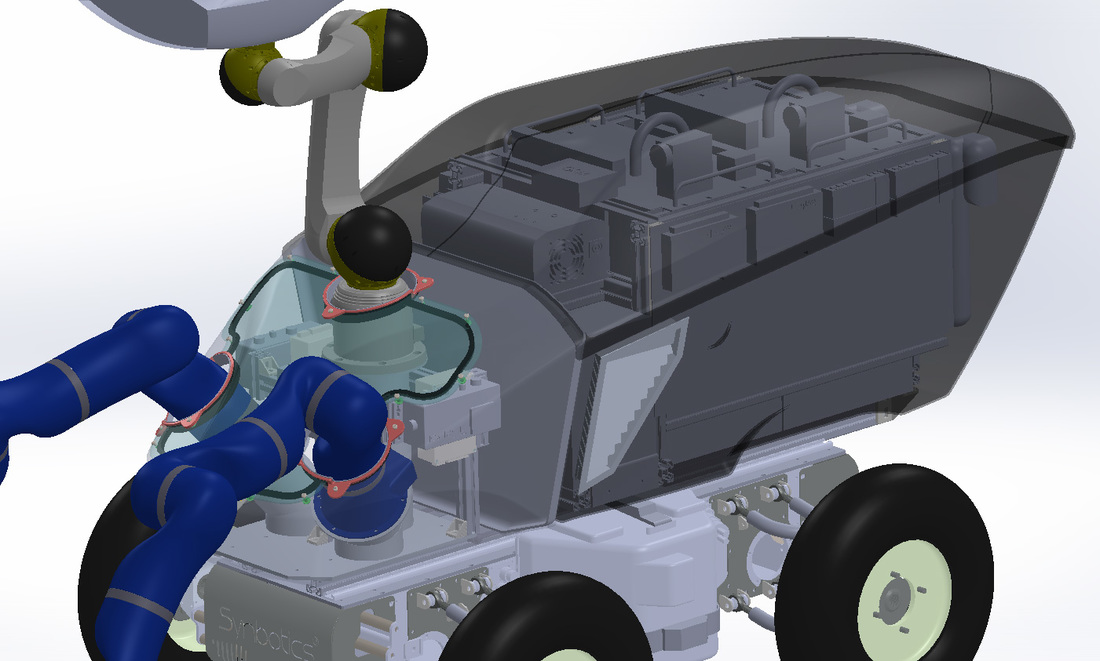
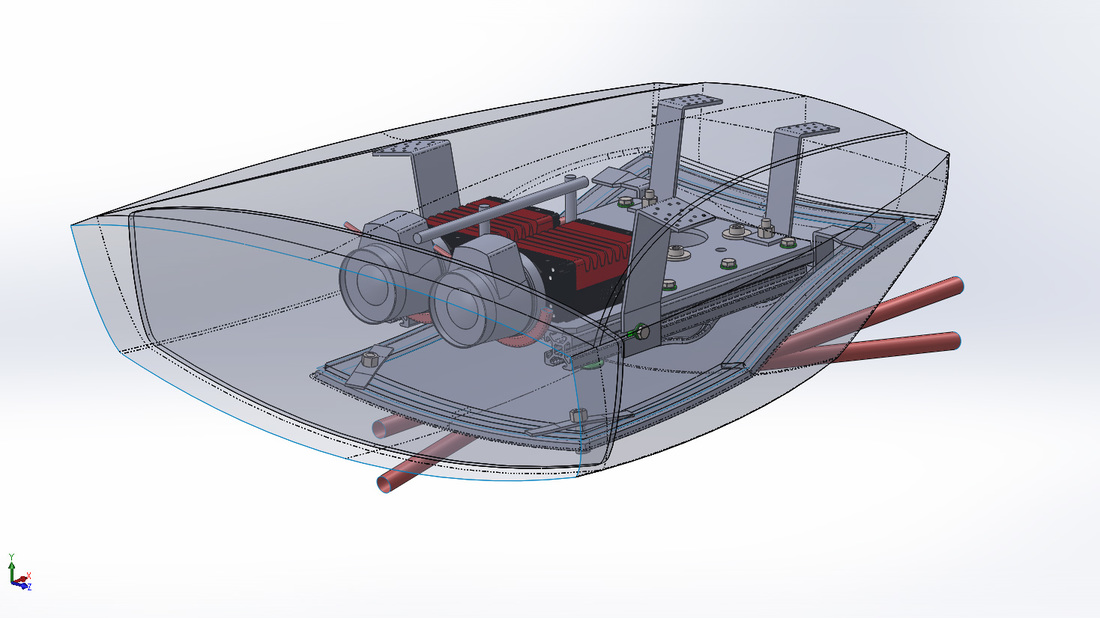
CAD model of the Interact Rover, with the internal structure visible.

The tightly packed internals of the rover with the lid removed.
The current team working on the Interact Project.
|

First integration of the Interact Rover.
|
Relevant Links:
Official website of the Interact Project.
More information about the ESA Telerobotics & Haptics Lab
Official Interact Project page on the website of the ESA Telerobotics & Haptics Lab
Opening of the TUDelft Space Institute with the live demo of the Interact Rover
Towards the Interact Space Experiment: Controlling an Outdoor Robot on Earth's Surface from Space
Official website of the Interact Project.
More information about the ESA Telerobotics & Haptics Lab
Official Interact Project page on the website of the ESA Telerobotics & Haptics Lab
Opening of the TUDelft Space Institute with the live demo of the Interact Rover
Towards the Interact Space Experiment: Controlling an Outdoor Robot on Earth's Surface from Space

