Teleoperation Demonstrator
European Space Agency - Telerobotics & Haptics Laboratory



|
|
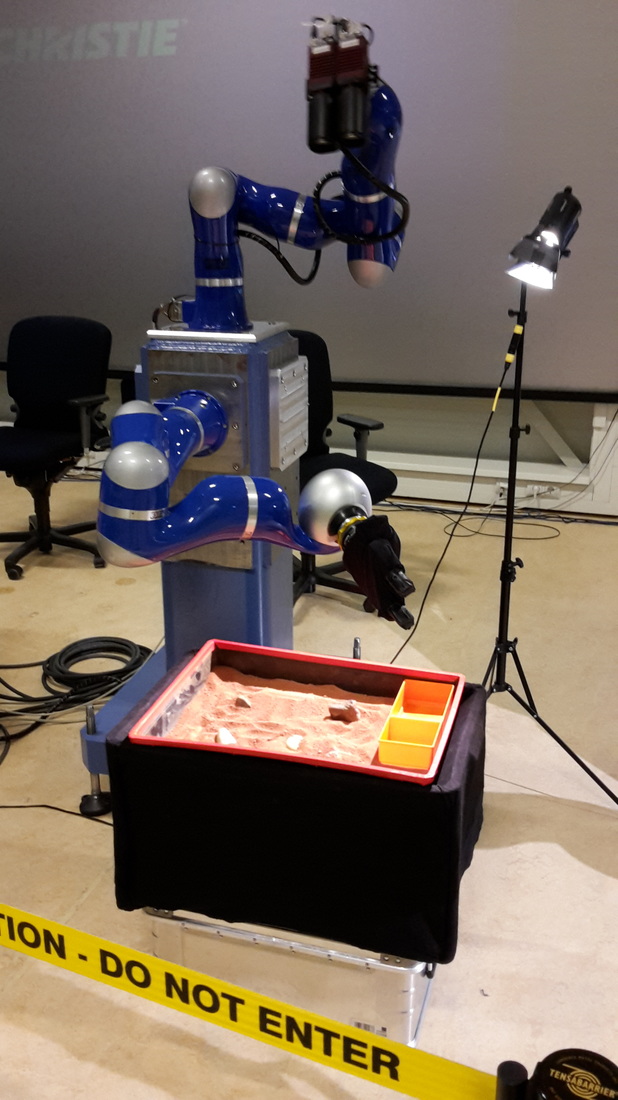
This is a mini-project I picked up during my work at the agency. We were preparing demonstrations for the "International symposium on moon" and wanted to show to show how teleoperated robots would interact with non-rigid bodies while manipulating cables, fabrics or in this case; picking up objects out of sand. Since this process involved digging through the sand, a two-layer robotic gripper "glove" had to be built to prevent the sand ingress into the bearings of the robot. The inner layer is 0.25 mm latex to stop the very fine particles, and the outer layer is Lycra to protect the inner layer from the larger sharp granules. This setup was supposed to be temporary, but ended up becoming one of our favorites as visiting scientists would always ask to try it out themselves.

